زنبور مکانیکی BionicBee و پرواز خود مختار میان ازدحام زنبورها در Festo سروصدایی ایجاد کرده است...
بخشی از شبکه یادگیری بیونیک، بیش از 15 سال است که در حال کاوش در شگفتی پرواز است، در آن زمان در مورد اشیاء پرنده متعدد و اصول طبیعی آنها تحقیق کرده ست و از مدلهای بیولوژیکی تا فناوری خودمختار را بر اساس آنها ایجاد کرده است.
رفتار ازدحام خودمختار همچنان با چالش بزرگی مواجه بود، BionicBee اولین جسم پرنده ای است که این تیم توسعه داده است و می تواند به طور کاملاً مستقل در تعداد زیاد و به عنوان بخشی از یک گروه پرواز کند.
BionicBee کوچکترین شی پرنده شبکه یادگیری Bionic تا به امروز است و برای اولین بار، توسعه دهندگان از روش طراحی مولد Festo استفاده کردند.
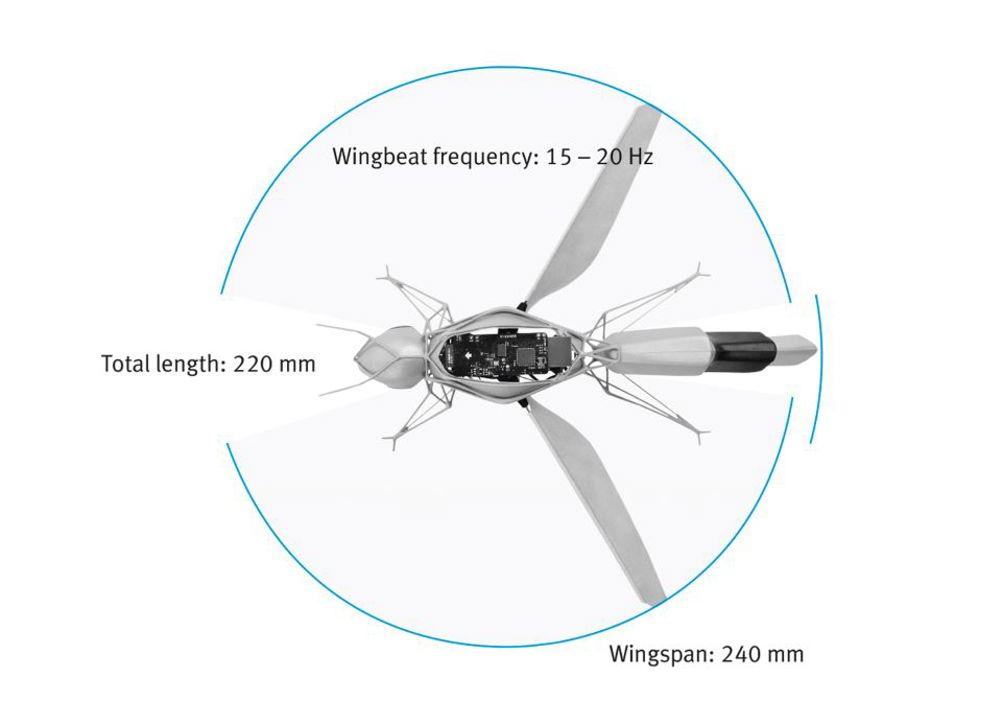
BionicBee با وزن 34 گرم که در Hannover Messe 2024 به نمایش گذاشته شد، کوچکترین شی پرنده ای است که توسط شبکه یادگیری بیونیک تا به امروز با طول 220 میلی متر و طول بال های 240 میلی متر ساخته شده است.
زنبور عسل توسط یک سیستم مکان یابی داخلی با فناوری فوق عریض (UWB) فعال می شود که در آن هشت لنگر UWB در دو سطح برای اندازه گیری دقیق زمان نصب شده است و به زنبورها اجازه می دهد تا خود را در فضا قرار دهند.
به گفته فستو، لنگرهای UWB سیگنال هایی را به زنبورهای جداگانه ارسال می کنند که می توانند به طور مستقل فاصله تا عناصر فرستنده مربوطه را اندازه گیری کنند و موقعیت خود را در فضا با استفاده از مهرهای زمانی محاسبه کنند.
اشیاء پرنده فوق سبک با طراحی ظریف
BionicBee با حدود 34 گرم وزن، 22 سانتیمتر طول و با طول بالهای 24 سانتیمتر، کوچکترین جسم پرنده از شبکه یادگیری بیونیک تا به امروز است، این اولین بار است که توسعه دهندگان از روش طراحی مولد استفاده می کنند: پس از وارد کردن چند پارامتر، یک نرم افزار ساختار بهینه را بر اساس اصول طراحی خاص پیدا می کند تا از حداقل مواد لازم برای ایجاد پایدارترین طرح ممکن استفاده کند. (این ساختار سبک وزن ثابت برای مانور خوب و مدت زمان پرواز بسیار مهم است)
ادغام عملکردی در یک فضای نصب تنگ
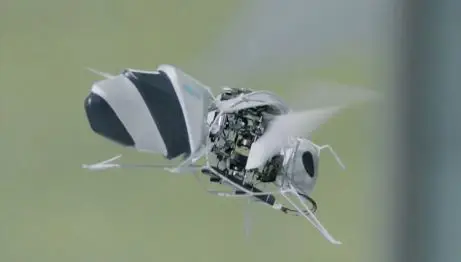
بدن زنبور، محفظه فشرده مکانیزم بال ضربان، فناوری ارتباطی و همچنین اجزای کنترلی ضربان بال و انطباق هندسه بال را تشکیل می دهد، یک موتور براشلس، سه موتور سروو، باتری، گیربکس و PCB های مختلف در تنگ ترین فضاها نصب می شوند.
تعامل هوشمند بین موتورها و مکانیک به این معنی است که برای مثال، فرکانس ضربان بال را می توان دقیقاً برای مانورهای مختلف تنظیم کرد.
برای پرواز به صورت دسته جمعی، زنبورها مسیرهای مشخص شده توسط یک کامپیوتر مرکزی را دنبال می کنند، فستو افزود که برنامه ریزی پرواز شامل تعامل متقابل احتمالی از طریق تلاطم هوا است.
ادغام عملکردی در یک فضای کوچک: بدن زنبور شامل طراحی فشرده برای مکانیسم کوبیدن بال، فناوری ارتباطی و اجزای کنترل برای ضربه زدن بال و انطباق هندسه بال است. (Festo)
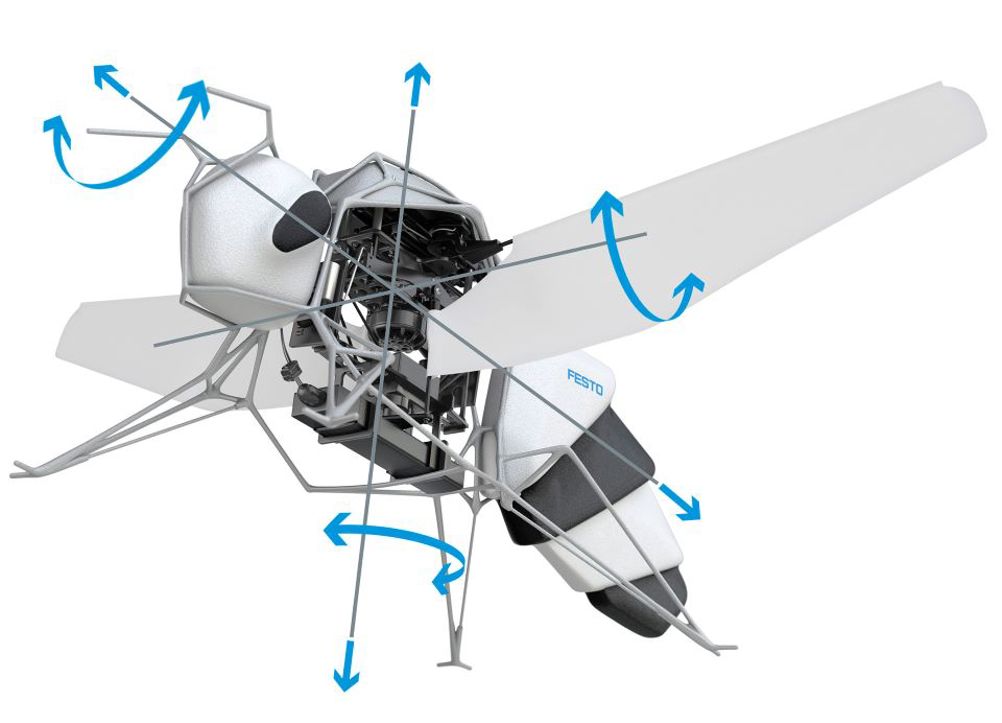
مانورهای پرواز طبیعی با چهار درجه آزادی
زنبور مصنوعی با فرکانس ضربان بال 15 تا 20 هرتز پرواز می کند و بال ها با زاویه 180 درجه به جلو و عقب می زنند، موتور بدون جاروبک، ضربات بال را بدون عکس العمل از طریق ساختار مکانیکی بسیار سبک هدایت می کند. (هر چه سرعت بیشتر باشد، فرکانس ضربان بال و بالابر بالاتر است)
سه موتور سروو در پایه بال، هندسه بال را به روشی خاص تغییر می دهند، بنابراین کارایی موقعیت های خاص بال را افزایش می دهند و تنوع خاصی از بالابر را ایجاد می کنند.
اگر قرار باشد زنبور عسل به جلو پرواز کند، هندسه طوری تنظیم می شود که بالابر در موقعیت بال عقب بیشتر از موقعیت جلو باشد. این باعث می شود بدن به جلو متمایل شود (زمین)، و زنبور به جلو پرواز می کند.
اگر هندسه به گونهای تنظیم شود که بال راست نسبت به بال چپ نیروی بیشتری ایجاد کند، زنبور عسل حول محور طولی به سمت چپ میغلتد و به پهلو پرواز میکند و گزینه دیگر این است که آن را به گونه ای تنظیم کنید که یک بال در جلو و بال دوم بالابر بیشتری در عقب ایجاد کند. (این باعث می شود که زنبور عسل به دور محور عمودی بچرخد)
پرواز خودمختار در یک ازدحام
رفتار خودمختار ده زنبور عسل توسط یک سیستم محلی سازی داخلی با فناوری فوق پهن باند (UWB) امکان پذیر شده است. هشت لنگر UWB در دو سطح در فضا نصب شده است و این بدان معناست که زمان اجرا را می توان به دقت اندازه گیری کرد و زنبورها می توانند خود را در فضا قرار دهند.
لنگرهای UWB سیگنال هایی را به زنبورهای منفرد می فرستند که به طور مستقل فاصله تا فرستنده ها را اندازه می گیرند و می توانند موقعیت خود را در فضا با استفاده از مهرهای زمانی محاسبه کنند.
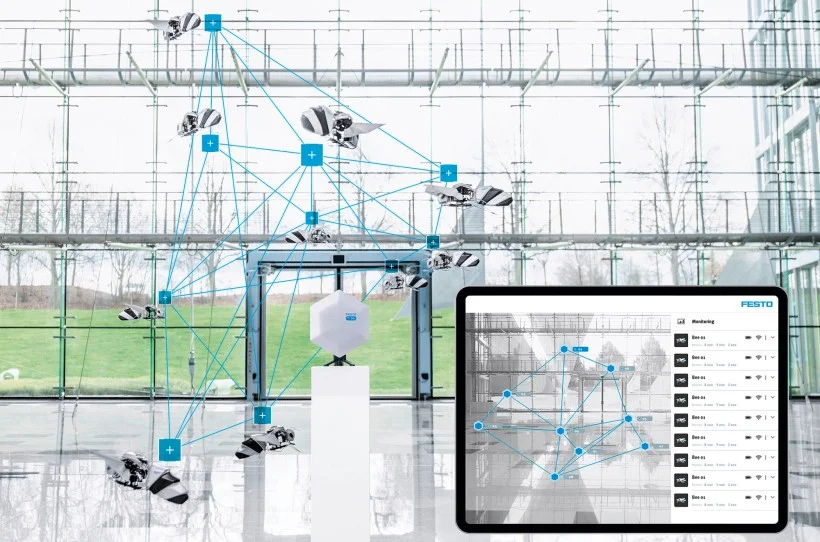
برای پرواز به صورت دسته جمعی، زنبورها مسیرهای مشخص شده توسط یک کامپیوتر مرکزی را دنبال می کنند، دقت مکانی و زمانی بالا برای پرواز ایمن و بدون برخورد در شکل گیری نزدیک مورد نیاز است.
فعل و انفعال متقابل احتمالی ناشی از تلاطم هوا (downwash) نیز باید هنگام برنامه ریزی مسیر در نظر گرفته شود.
از آنجایی که هر زنبور با دست ساخته میشود، حتی کوچکترین تفاوتهای تولیدی نیز میتواند بر رفتار پرواز تأثیر بگذارد، به همین دلیل است که زنبورها دارای یک عملکرد کالیبراسیون خودکار نیز هستند، به طوری که پس از یک پرواز آزمایشی کوتاه، هر زنبور پارامترهای کنترل کننده بهینه خود را تعیین می کند.
این روشی است که الگوریتم هوشمند میتواند تفاوتهای سختافزاری بین زنبورها را مشخص کند و این به نوبه خود اجازه می دهد تا کل ازدحام به صورت خارجی کنترل شود که گویی همه زنبورها یکسان هستند.
هنگام توسعه BionicBee، توسعه دهندگان از بینش های متعددی که در پروژه های قبلی به دست آورده بودند، استفاده کردند و این مورد بعدی از یک سری اشیاء پرنده بیونیک است که به عنوان بخشی از شبکه یادگیری بیونیک ما ایجاد شده است.
برای بیش از 15 سال، ما پلتفرم های تحقیقاتی را با استفاده از اصول فنی کلی که بر اساس طبیعت است، توسعه می دهیم.
یک الگوریتم تفاوتهای سخت افزاری بین زنبورهای منفرد را محاسبه میکند و به گروه اجازه میدهد تا از بیرون کنترل شود، انگار همه آنها یکسان هستند.
لینک سایت مرجع
مالکیت معنوی مجله انرژی (energymag.ir) علامت تجاری ناشر است... سایر علائم تجاری مورد استفاده در این مقاله متعلق به دارندگان علامت تجاری مربوطه می باشد، ناشر وابسته یا مرتبط با دارندگان علامت تجاری نیست و توسط دارندگان علامت تجاری حمایت، تایید یا ایجاد نشده است، مگر اینکه خلاف آن ذکر شده باشد و هیچ ادعایی از سوی ناشر نسبت به حقوق مربوط به علائم تجاری شخص ثالث وجود ندارد.