محققان به سگ روباتی یاد دادند که در را با پای خود باز کند، این ربات می تواند درها را باز کند، یک کوله پشتی حمل کند و حتی نمونه های سنگ را جمع آوری کند.
رباتهای چهار پا و الهامگرفته از سگ در سالهای اخیر به دلیل توانایی منحصربهفردشان در مانور دادن سریع و ایمن در مناطق خطرناک یا غیرقابل دسترس برای انسان، محبوبیت خود را در میان دانشمندان و بخش های مختلف صنعت، افزایش دادهاند.
برخی از این رباتها، مانند Boston Dynamics’ Spot، میتوانند از پنجههای بزرگ و سایر اتصالات برای کمک به تعامل با دنیای اطراف خود استفاده کنند.
اما این اندامهای اضافی همیشه ایدهآل نیستند، زیرا وزن اضافه میکنند و فضای بیشتری را اشغال میکنند، که هر دو میتوانند اثربخشی سگ روبوس را در راهروهای تنگ محدود کنند.
محققان آزمایشگاه سیستمهای رباتیک ETH زوریخ در سوئیس سعی کردند این معضل را با آموزش دادن به سگ ربات خود برای استفاده از یکی از چهار اندام خود برای انجام کارهایی مانند باز کردن در و حرکت دادن اجسام در حالی که به طور همزمان به سه عضو دیگر برای راه رفتن و حفظ تعادل تکیه میکنند، حل کنند.
در مقالهای که اخیراً منتشر شده و یافتههای خود را مستند میکند، محققان میگویند که آنها معتقدند این استفاده جدید از اندام ربات میتواند روزی به اکتشاف فضایی و سناریوهای دیگر که در آن وزن و املاک مکانیکی بالاتر است، کمک کند.
سگ ربات چگونه از پای خود استفاده می کند؟
محققان از یک مدل یادگیری تقویتی برای آموزش به سگ ربات، یک مدل ANYmal که توسط شرکت ANYbotic ساخته شده است، استفاده کردند تا یک سری کارها را انجام دهد که در آن باید محیط خود را دستکاری کند، زمانی که ربات اندام راست جلوی خود را در محل مورد نظر قرار داد، مدل با تقویت مثبت پاداش دریافت کرد.
از طرف دیگر، زمانی که ربات از حرکات تند و ناامن بالقوه استفاده کرد، مدل تقویت منفی را احیا کرد و از آنجا، ربات یاد گرفت که از سه پای باقی مانده خود برای حفظ تعادل و حرکت استفاده کند. محققان توانستند ربات را با استفاده از جوی استیک روی یک کنترل از راه دور حرکت دهند.
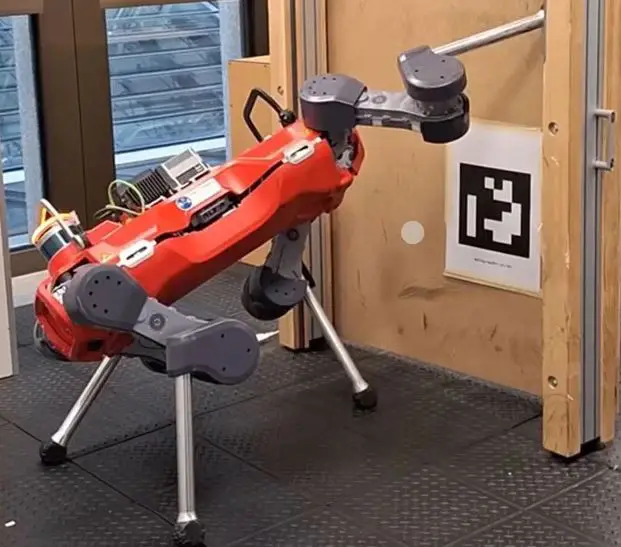
عکسهای این آزمایش نشان میدهد که ربات اندام جلویی خود را بالا میبرد و آن را در کنار دستگیره در قرار میدهد قبل از اینکه وزن خود را برای باز کردن آن جابجا کند و از قضا، این حرکت بی شباهت به سگ زنده پشمالویی نیست که پای خود را برای تسکین خود با شیر آتش نشانی بلند می کند.
در جای دیگر، روبات را می توان دید که یک بند کوله پشتی را به دور اندام خود می پیچد و سپس کیسه را در یک ظرف پلاستیکی فهرست می کند، محققان همچنین با اتصال یک چنگال مانند به انتهای ساق پا آزمایش کردند که به ربات اجازه می داد با موفقیت نمونه های سنگ را بگیرد و جمع آوری کند.
این ربات همچنین میتواند از بازوی خود برای جابجایی موانع کوچک از سر راه خود و فشار دادن دکمههایی که دسترسی به آنها دشوار است استفاده کند.
محققان نوشتند: کار ما نشان میدهد که بسیاری از کارهای دستکاری را میتوان تنها با انجام پدیپلاسیون با روباتهای چهارپا حل کرد، این بینش برای کارهای آینده در مورد طراحی و کنترل دستکاریکنندههای متحرک پا مرتبط خواهد بود.
محققان این ربات را در زمین های نامنظم آموزش دادند تا اطمینان حاصل کنند که همچنان می تواند تعادل خود را حفظ کند، حتی زمانی که با سناریوهای کمتر از ایده آل در دنیای واقعی مواجه می شود.
برای آزمایش حفظ تعادل ربات، محققان آن را روی یک تخته سفید صاف و بدون اصطکاک قرار دادند و از آن خواستند تا وظایف خود را انجام دهد. (لیز خورد اما نیفتاد)
چگونه این سگ بر روی سه پا می تواند مفید باشد؟
اگرچه سگ سه پا لزوما به اندازه مدل های دیگر با چنگال های قابل اتصال موثر نبود، اما محققان می گویند قدرت واقعی آن در سادگی آن است، ربات محققان با از دست دادن هر گونه پنجه یا ابزار اضافی، از افزودن پیچیدگی مکانیکی غیر ضروری بیشتر جلوگیری می کند.
این رویکرد همچنین وزن را کاهش می دهد و می تواند مصرف انرژی را کاهش دهد، که هر دو می توانند به ویژه در اکتشافات فضایی یا ماموریت های جستجو و نجات از راه دور مفید باشند.
روزگاری که روباتها به بازو - ی مکانیکی - نیاز داشتند، گذشته است و این سگ رباتیکی می تواند به جای آن (بازوی مکانیکی یا اهرم) از یکی از پاهایش استفاده کند.
لینک سایت مرجع
مالکیت معنوی مجله انرژی (energymag.ir) علامت تجاری ناشر است... سایر علائم تجاری مورد استفاده در این مقاله متعلق به دارندگان علامت تجاری مربوطه می باشد، ناشر وابسته یا مرتبط با دارندگان علامت تجاری نیست و توسط دارندگان علامت تجاری حمایت، تایید یا ایجاد نشده است، مگر اینکه خلاف آن ذکر شده باشد و هیچ ادعایی از سوی ناشر نسبت به حقوق مربوط به علائم تجاری شخص ثالث وجود ندارد.